 Andrea Favero
Andrea FaveroARCHITECTURE:
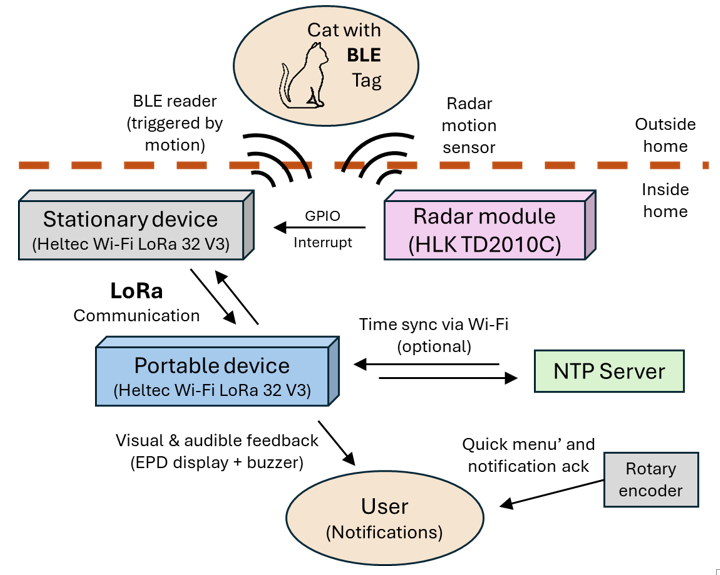
HARDWARE
Main components to make this system:
| Qty | Part Description |
|---|---|
| 2 | Heltec Wi-Fi LoRa 32 V3 board (with antenna & JST battery connector) |
| 1 | BLE tag – Tile Sticker (per each cat) |
| 1 | Collar with tag sleeve |
| 1 | 2.9" EPD Waveshare display (black and white) |
| 1 | LiPo battery 3.7V 2200mAh (approx. 35.5 x 77 x 8.4mm) |
| 1 | HLK TD2010C radar module |
| 1 | Rotary encoder with push button |
| 1 | Buzzer (DC 3.3–5V with transistor) |
| 2 | USB-C female connector, panel mount |
| 2 | USB-C male connector (with D+ D– or A6 A7 lines) |
| 2 | Mini rocker switch (slot 13.2 x 9 mm) |
Extra materials and small parts:
| Qty | Item Description |
|---|---|
| 1 | 90° male header, 2.54" x 18 (uased at Heltec board J3) |
| Some | Dupont wires (female connectors) |
| 1 | Long USB-C cable (or power bank) |
| ~10 | M3x10 conical head screws |
| ~10 | M3x12 conical head screws |
| 1 | M4x12 conical head screw |
| 4 | M2.5x10 bolts (for EPD, often included) |
| ~220g | Filament for 3D printed parts (PETG) |
| - | Power supply (standard phone charger, ≥500mA) |
| - | Aluminium tape (for radar shielding) |
MAIN BOARDS:
The Heltec Wi-Fi LoRa 32 V3 board has been chosen for this project due to its useful features:
- LoRa (Long Range) communication protocol, with its dedicated antenna. This enables reliable communication between the two devices, even across different (concrete) floors.
- BLE (Bluetooth Low Energy) protocol is the core of this system. It is used to scan for the BLE tags.
- Battery management, which is useful for the portable device. It supports battery operation, charging, and charge level monitoring.
- ESP32-S3 microcontroller, which allows for low power consumption between periodic communications with the stationary device (using the light sleep function).
- Wi-Fi, which is optional, but allows the system to synchronize the date and time via an internet NTP service.
- A small OLED display, which is especially useful during code development and debugging.
- MCU can be programmed in MicroPython.
(documentation at: https://heltec.org/project/wifi-lora-32-v3/)
SENSOR CHOICE:
Objective of this system is detecting our cats when they’re out of the door and waiting for us to let them inside. On below table are listed the sensor’s types considered, and the reasons leading to the final choice.
| Sensor type | Pros, cons. considerations |
| Cat’s microchip | Cat’s microchips are passive RFID: These components can be read at no more than 10~15 centimetres of distance, not a reliable option for this application. These sensors can be reliably used in small and obliged passages, like the cat flap doors. We cannot modify the door, due to building’s policy, so these cat’s flap doors weren’t an option for us. |
| PIR | (Passive Infra-Red) sensors are largely influenced by surrounding temperature. I haven’t tried, but I think it will be difficult to find a setting working both in winter and in summer; Furthermore, our door points to west, so often the sun hits it theoretically reducing the PIR sensors’ reliability. |
| Camera | I like computer vision, but I haven’t even consider it as a viable option. This system must especially work in winter, where in The Netherlands there is little light; A camera based, will also require massive training to distinguish our cats from the many others in this large garden, under very different light conditions. I feared this way would turn into an endless project. |
| BLE tag | (Bluetooth Low Energy) are small, battery-powered devices using Bluetooth to transmit data wirelessly. This is perfect to distinguish our cats from the others, but determining the distance from the sensor is not reliable. |
| 24GHz FMCW radar | FMCW (Frequency Modulated Continuous Wave) can determine the distance of reflective objects (metal and water); It isn’t influenced much by light or temperature. Another positive aspect is that it can be place inside, as the 24GHz can still pass through (non-metal) materials. This technology has become very popular to sense human presence, leading to a good option of choices and rather low cost. The radar... |
 Discreet Mayor
Discreet Mayor
 Manuel Alfonso
Manuel Alfonso
 Ulrich
Ulrich
 kabaivanov
kabaivanov